1. 概述
本智能雷达水位传感器是我公司拥有自主知识产权的系列智能设备之一,主要用于水位数据的采集、存储、处理和传输,默认使用《水文监测数据通信规约》(SL651-2014)报文格式,也可根据客户需求定制报文。智能雷达水位传感器使用嵌入式硬件架构,集成了太阳能板、锂电池、控制模块、通信模块等;采用一体化设计,智能APP管理,特别适合免维护无人水位站的建设。
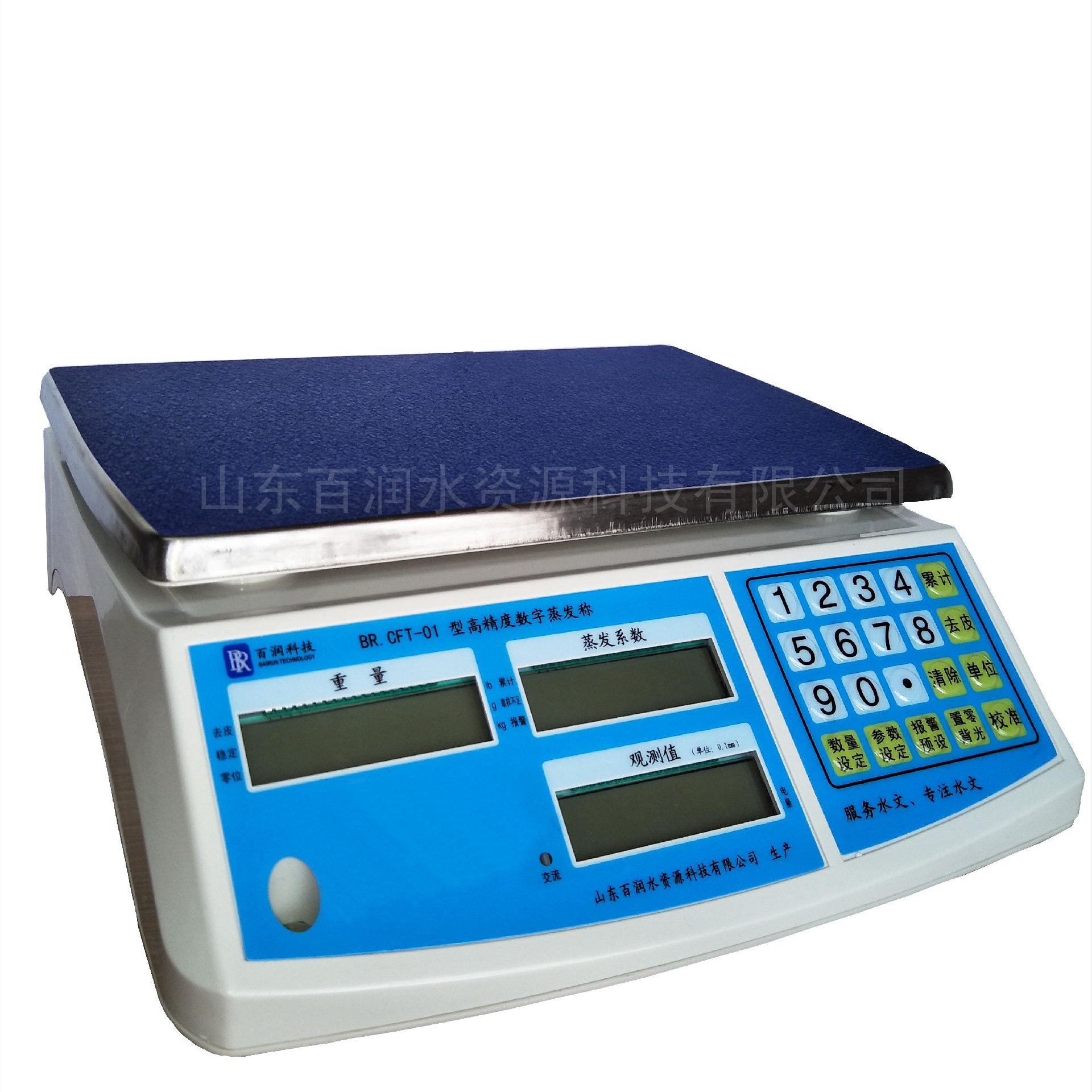
2. 主要技术性能
整体列表如下:
水位传感
测量距离:0~30.0米
显示分辨率:1毫米
积分时间:0~36s,可调
微波频率:26GHz
数据采集
工作模式:自报;查询应答
通信协议:主要SL651-2014,也可定制
实时时钟:*大月误差不超过10 s
数据存储:能存储24个月(5min采集时间间隔)以上的数据
设备管理:支持现地和远程管理
供电部分
内置电池:锂电池,20000mAH
外置太阳能板:6V8W太阳能板
通信部件
内置通信模组,全网通标准模块
基本参数
工作环境:温度-10℃~55℃;相对湿度≤95%;大气压86~106kPa
工作时间:不小于25000h
使用寿命:5年
3. 仪器结构与工作原理
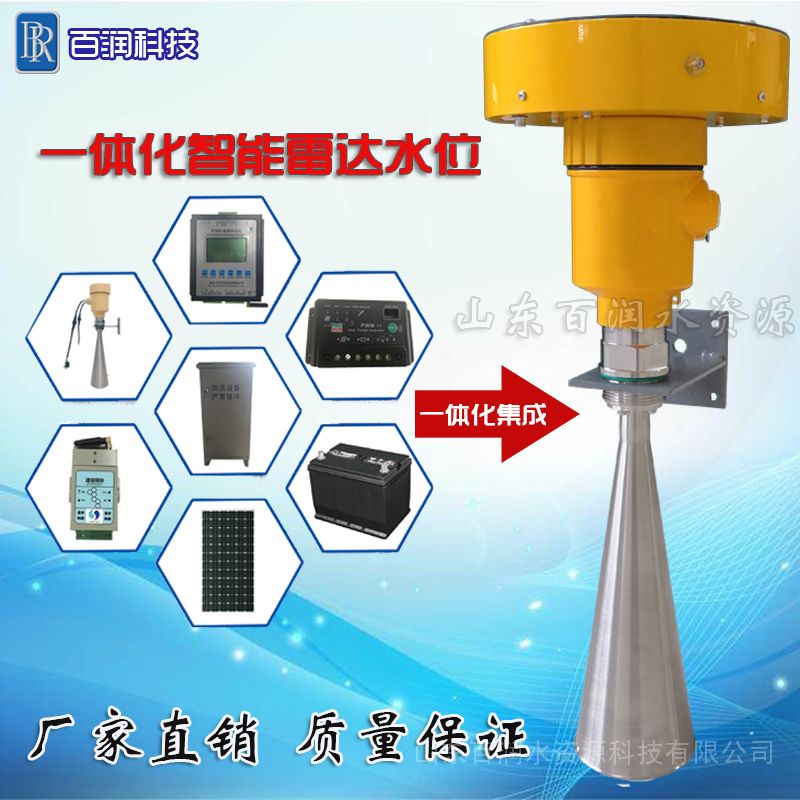
3.1. 仪器结构
智能雷达水位传感器将太阳能板、锂电池、控制模块、通信模块等集成为一体,真正做到了小巧轻便,安装简单。
图 1智能雷达水位传感器结构
3.2. 工作原理
3.2.1. 微波雷达工作原理
智能雷达水位传感器天线发射极窄的微波脉冲,这个脉冲以光速在空间传播,遇到被测介质表面,其部分能量被反射回来,被同一天线接收。发射脉冲与接收脉冲的时间间隔与天线到被测介质表面的距离成正比。由于电磁波的传播速度极高,发射脉冲与接收脉冲的时间间隔很小(纳秒量级)很难确认,本智能雷达水位传感器采用一种特殊的解调技术,可以准确识别发射脉冲与接收脉冲的时间间隔,从而进一步计算出天线到被测介质表面的距离。
图 2 微波雷达工作原理图
A 量程设定
B 低位调整
C 高位调整
D 盲区范围
测量的基准面是:螺纹底面或法兰的密封面
注意:使用智能雷达水位传感器时,务必保证*高液位不能进入测量盲区(图中D所示区域)。
3.2.2. 水位测量原理
图 3 智能雷达水位传感器水位测量原理图
(1)基于上图,若智能雷达水位传感器的量程是30米
(2)智能雷达水位传感器空高=水位计到水面距离=5米
(3)智能雷达水位传感器料高=量程-空高=30米-5米=25米
(4)服务器的值=水面高度-料高=1015米-25米=990米
(5)查询软件水位=990米+水位传感器的料高值
例1:水位上升1米,水位计读数(料高)变为26米,采集软件水位值=990米+26米=1016米
例2:水位下降3米,水位计读数(料高)变为22米,采集软件水位值=990米+22米=1012米
 扫一扫,手机浏览
扫一扫,手机浏览